



Doziemne wyładowania atmosferyczne stanowią poważne zagrożenie dla życia ludzkiego i dóbr materialnych. Nie w każdym jednak przypadku zastosowanie tradycyjnych środków ochrony w postaci zewnętrznych instalacji piorunochronnych [1] i układów do ograniczania przepięć [2] jest rozwiązaniem dostatecznym, a czasami ich użycie jest wręcz niemożliwe do zastosowania.
Spis treści
2. Fazy formowania się frontów burzowych i klasyfikacja urządzeń detekcyjnych
4. Zasada działania systemów TWS
1. Wstęp
Przykładem może być ochrona istot żywych na obszarach o znacznej powierzchni, gdzie intensywność wyładowań piorunowych jest szczególnie wysoka (np. szlaki górskie Tatrzańskiego Parku Narodowego). W takich przypadkach niezwykle cenna może być informacja o zbliżającym się zagrożeniu piorunowym otrzymywana ze specjalnych systemów wykrywających zagrożenie piorunowe w najbliższej okolicy, pozwalająca na podjęcie stosownych kroków zapobiegawczych w celu ograniczenia skutków oddziaływania wyładowań atmosferycznych. Poza istniejącymi systemami detekcji i lokalizacji wyładowań atmosferycznych, dostarczającymi na zasadach komercyjnych informacji o zagrożeniu piorunowym na rozległych obszarach (np. całych krajów lub kontynentów), na rynku pojawia się coraz więcej niezależnych systemów o zasięgu lokalnym, umożliwiających ostrzeganie przed zagrożeniem piorunowym konkretnych obiektów. Doceniając znaczenie systemów ostrzegania przed wyładowaniami atmosferycznymi (TWS – ang. Thunderstorm Warning System), a także w celu uporządkowania standardów, jakie powinny one spełniać w roku 2003 Europejski Komitet Normalizacyjny Elektrotechniki (CENELEC) rozpoczął prace normalizacyjne w tym zakresie. Po niespełna 8 latach pracy w czerwcu 2011 r. CENELEC udostępnił ostateczną wersję wymagań dla systemów TWS w ramach nowej normy EN 50536 „Protection against lightning – Thunderstorm warning systems” [3]. W normie zawarto między innymi klasyfikację systemów TWS, ich ogólną charakterystykę, a także przykłady aktualnych zastosowań. Zgodnie z harmonogramem prac Polskiego Komitetu Normalizacyjnego norma ta powinna być uznana za polską normę do 14 lutego 2012 r.
2. Fazy formowania się frontów burzowych i klasyfikacja urządzeń detekcyjnych
Funkcjonowanie lokalnego systemu ostrzegania przed burzami oparte jest na wiedzy o fizyce wyładowań atmosferycznych. W normie zdefiniowano cztery fazy formowania się frontów burzowych:
- fazę wstępną (faza 1.): gromadzenie się ładunków elektrycznych w chmurach burzowych, powodujące zauważalne zmiany pola elektrostatycznego przy powierzchni ziemi;
- fazę rozwoju (faza 2.): pojawienie się pierwszych oznak aktywności burzowej w postaci wyładowań między chmurami (IC – Intra-Cloud) lub wyładowań doziemnych (CG – ang. Cloud-to-Ground);
- fazę dojrzałości (faza 3.): występowanie wyładowań zarówno typu IC, jak i CG;
- fazę rozproszenia (faza 4.): zanikanie zarówno wyładowań atmosferycznych typu IC, jak i CG przy postępującej redukcji natężenia pola elektrostatycznego do poziomu występującego przy dobrej pogodzie.
W zależności od zdolności wykrywania i rozróżniania poszczególnych faz burzy, urządzenia detekcyjne wykorzystywane w systemach TWS podzielono na cztery klasy:
Urządzenia klasy I. wykrywają wszystkie fazy formowania się frontów burzowych umożliwiając ostrzeżenie już przed pierwszym wyładowaniem burzowym, a także przez cały okres, kiedy to zagrożenie występuje. Ich zasada działania oparta jest na pomiarze natężenia lokalnego pola elektrostatycznego, które w warunkach dobrej pogody wynosi około 100…150 V/m, a bezpośrednio przed wyładowaniem może przekraczać nawet kilkanaście kV/m. Nie jest jednak możliwe sprecyzowanie, przy jakim natężeniu pola elektrostatycznego następuje wyładowanie. Zaleca się, aby zakres pomiarowy czujnika wynosił ±20 kV/m z minimalną rozdzielczością 200 V/m. O ile to możliwe, system powinien informować również o zmianach natężenia pola w czasie. W związku z tym, iż w praktyce zmiany natężenia pola mogą być rejestrowane, gdy chmura burzowa znajdzie się w odległości około 20 km od czujnika, to urządzenia detekcyjne klasy I stosowane są jedynie w systemach o zasięgu lokalnym.

Rys. 1. Przykładowy czujnik pola elektrostatycznego
Do klasy II. zaliczono czujniki wykrywające burze na etapie rozwoju poprzez detekcję wyładowań zarówno typu IC, jak i CG (fazy 2. – 4.). Pierwsze wyładowanie doziemne poprzedzane jest często wyładowaniami między chmurami, w związku z tym wcześniejsze wykrycie IC może stanowić ostrzeżenie przed pierwszym wyładowaniem doziemnym. Detekcja obu typów wyładowań prowadzona jest w różnych zakresach częstotliwości: VHF (30 – 300 MHz) dla IC oraz VLF (3 – 30 kHz) lub LF (30 – 300 kHz) dla CG, dzięki czemu możliwe jest ich rozróżnienie.
Klasa III. obejmuje urządzenia wykrywające jedynie wyładowania doziemne (fazy 3. i 4.), które są w stanie wyeliminować sygnały pochodzące od innych źródeł zakłóceń elektromagnetycznych.
Do klasy IV natomiast zaliczono detektory, których wskazania mogą być zakłócone sygnałami nie pochodzącymi od wyładowań atmosferycznych i przyjmuje się, że wykrywają jedynie fazę dojrzałości burzy (faza 3.).
3. Metody detekcji
Ze względu na wielkość obszaru pokrycia systemy detekcji można podzielić na:
- rozbudowane sieci z jednostką centralną zbierającą dane z wielu czujników;
- niezależne urządzenia o zasięgu lokalnym.
W rozbudowanych sieciach detekcji i lokalizacji wyładowań atmosferycznych wykorzystuje się najczęściej metodę MDF (ang. Magnetic Direction Finder) lub TOA (ang. Time of Arrival). W metodzie MDF wykorzystuje się anteny kierunkowe w postaci ustawionych prostopadle względem siebie pętli magnetycznych. Współrzędne wyładowania wyznacza się na podstawie punktu przecięcia się prostych określających kierunek z co najmniej dwóch czujników. W metodzie TOA wykorzystuje się czasy opóźnienia potrzebne na pokonanie przez impuls elektromagnetyczny drogi z punktu wyładowania do poszczególnych urządzeń detekcyjnych: wyładowanie jest rejestrowane najpierw przez czujnik położony najbliżej punktu uderzenia pioruna. Inną techniką wykorzystywaną w sieciach detekcyjnych jest interferometria (RFI), polegająca na pomiarach różnic faz w położonych blisko siebie antenach.
Metody wykorzystywane w systemach lokalnych bazują przede wszystkim na analizie natężenia mierzonego sygnału. Nie są one w stanie określić położenia punktu uderzenia pioruna, a umożliwiają jedynie oszacowanie odległości i ewentualnie kierunku wyładowania. Podobnie jak w sieciach detekcyjnych, w systemach lokalnych wykorzystuje się także metodę MDF, która umożliwia wyznaczenie kierunku, a odległość oszacowywana jest na podstawie zmierzonej wartości maksymalnej i, ewentualnie, kształtu impulsu pola magnetycznego. Najprostsza metoda jest oparta na pomiarze natężenia pola sygnałów częstotliwości radiowych (RFM – ang. RF signal strength Measurements), jest to jednak metoda niedokładna ze względu na zmienną naturę wyładowań atmosferycznych. W celu zwiększenia precyzji wykorzystuje się często jednoczesny pomiar sygnałów optycznych. Urządzenia klasy I., które bazują na pomiarze natężenia pola elektrostatycznego (FSM ang. Field Strength Measurements), umożliwiają przewidzenie wystąpienia pierwszego wyładowania burzowego, ale nie pozwalają na określenie jego odległości.
W normie wymienia się także zastosowanie systemów satelitarnych, które na podstawie obrazowania optycznego (OI – ang. optical imaging) umożliwiają lokalizację wyładowań. Jest to metoda mniej dokładna od sieci detekcyjnych, jednak umożliwia analizę powierzchni oceanów będących poza zasięgiem systemów naziemnych.
4. Zasada działania systemów TWS
Zasięg pokrycia systemu (CA – ang. Coverage Area) powinien obejmować obszar monitorowany (MA – ang. Monitoring Area), dostatecznie duży dla wczesnego wykrycia zagrożenia. Dodatkowo, wokół obiektu lub obszaru poddawanego ochronie (TA – ang. Target Area) definiuje się obszar otaczający (SA – ang. Surrounding Area), wewnątrz którego wyładowania doziemne również stanowią zagrożenie o wysokim ryzyku. Za efektywny uznaje się taki alarm, po którym nastąpi wyładowanie doziemne w zasięgu strefy SA, w przeciwnym razie jest to traktowane jako alarm fałszywy. Norma nie precyzuje jednak dokładnego zasięgu poszczególnych stref.
Skuteczność systemów TWS scharakteryzowana jest za pomocą czterech zdefiniowanych w normie parametrów:
- FAR (ang. False Alarm Ratio): współczynnik określający stosunek liczby fałszywych alarmów do wszystkich alarmów wyzwolonych przez system;
- FTWR (ang. Failure To Warn Ratio): współczynnik określający stosunek liczby wyładowań doziemnych, które miały miejsce w zasięgu SA, przed którymi system nie wyzwolił alarmu do liczby wszystkich alarmów jakie powinny być wyzwolone;
- LT (ang. Lead Time): czas wyprzedzenia – między wyzwoleniem alarmu, a pierwszym wyładowaniem zarejestrowanym w zasięgu SA;
- EAD (ang. Excessive Alarm Duration): nadmierny czas trwania alarmu – między ostatnim wyładowaniem w zasięgu SA, a ustąpieniem stanu alarmowego.
W celu weryfikacji skuteczności systemu (określenia jego parametrów) zaleca się porównanie jego wskazań z danymi z istniejących sieci detekcji i lokalizacji wyładowań atmosferycznych. Wartości współczynników zależne są w dużej mierze od przyjętych granic obszaru SA. Systemy TWS powinny charakteryzować się jak najmniejszymi wartościami FAR, FTWR i EAD oraz optymalną wartością LT.
W normie opisano także przykład stopniowej skali oceny zagrożenia piorunowego przyporządkowujący różne stany ostrzegawcze poszczególnym fazom formowania się frontu burzowego: Alert (stan ostrzeżenia) dla faz 1 i 4, Emergency (stan zagrożenia) dla fazy 2 oraz Maximum Risk (stan maksymalnego ryzyka) dla fazy 3. Alarm powinien być wyzwolony już na etapie faz 1 i 2 z takim wyprzedzeniem czasowym LT, które umożliwi zastosowanie odpowiednich kroków prewencyjnych zapewniających bezpieczeństwo chronionego obiektu przed fazą dojrzałości burzy (faza 3). Po ustąpieniu wszelkich sygnałów wykrywanych przez system, konieczne jest podtrzymanie stanu alarmowego w celu uniknięcia zbyt częstego przełączania między stanami ostrzegawczymi. W dostępnych na rynku systemach lokalnych jako kryterium dla poszczególnych stanów ostrzegawczych wykorzystuje się najczęściej poziom natężenia pola elektrostatycznego lub zakres odległości rejestrowanych wyładowań doziemnych. W normie nie sprecyzowano jednak dokładnych wartości, przy których powinien być uruchamiany alarm. Pomimo to w dostępnych rozwiązaniach można doszukać się pewnych podobieństw: najwyższy stan ostrzegawczy wyzwalany jest najczęściej przy natężeniu pola elektrostatycznego przekraczającym wartość 7 kV/m lub zarejestrowaniu wyładowania doziemnego w odległości mniejszej niż 8…10 km.
Na rysunku 1 przedstawiono przykład wyzwalania stanu alarmowego przy przyjętym kryterium w postaci wykrycia wyładowania w zasięgu obszaru MA [3].
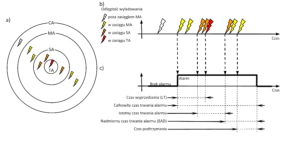
Rys. 2. Przykład wyzwalania alarmu: a) lokalizacja wyładowań w zdefiniowanych obszarach;
b) czas wystąpienia wyładowań; c) czas wyzwolenia alarmu.
5. Przykłady zastosowań TWS
Systemy ostrzegania przed burzami powinny być stosowane tam, gdzie nie jest możliwe zastosowanie tradycyjnych środków ochrony przed skutkami wyładowań atmosferycznych (np. otwarte przestrzenie) lub zastosowanie maksymalnych rozwiązań nie redukuje wartości ryzyka poniżej wartości ryzyka tolerowanego [4] i możliwe jest zastosowanie stosownych działań prewencyjnych.
Jako przykładowe obszary zastosowań systemów TWS w normie wymienione zostały między innymi:
- ochrona ludzi na otwartych przestrzeniach: miejsca pracy, wydarzenia sportowe, imprezy masowe, gospodarstwa rolne;
- elektrownie wiatrowe, rozbudowane systemy solarne, linie energetyczne itp.;
- ochrona wrażliwej aparatury elektronicznej: systemy komputerowe, systemy elektryczne i elektroniczne, systemy alarmowe, systemy bezpieczeństwa;
- zapobieganie stratom w procesach przemysłowych;
- zapobieganie wypadkom związanym z substancjami niebezpiecznymi (np.: łatwopalnymi, radioaktywnymi, toksycznymi i wybuchowymi)
- infrastruktura: porty, lotniska, kolej, autostrady
- kontrola ruchu: lotniska, koleje linowe

Rys. 3. Przykład stacji sygnalizacji alarmowej systemu TWS
z syrenami dźwiękowymi i lampą stroboskopową
Jako przykładowe akcje prewencyjne wymieniono nadawanie wizualnych lub akustycznych komunikatów ostrzegawczych, ewakuację zagrożonych obszarów, uruchomienie generatorów zasilania awaryjnego lub odłączenie wrażliwej aparatury elektronicznej.
Jako jeden z przykładów zastosowania systemów TWS przedstawiono pole golfowe, na obszarze którego występuje niedopuszczalne ryzyko utraty życia ludzkiego na skutek porażenia istot żywych. Zastosowanie systemu ostrzegawczego pozwala na zredukowanie ryzyka poprzez zastosowanie działań prewencyjnych w postaci ewakuacji ludzi na czas zagrożenia. Inny opisany w normie przykład stanowią elektrownie wiatrowe, dla których zidentyfikowano ryzyko porażenia pracowników wykonujących prace konserwacyjne, a także możliwość utraty ciągłości dostarczania energii na skutek uszkodzenia turbin. Wczesne ostrzeżenie o zagrożeniu piorunowym pozwala na podjęcie działań zapobiegawczych w postaci wstrzymania ewentualnych prac konserwacyjnych oraz odłączenia wrażliwych układów elektronicznych i tymczasowego zatrzymania turbin i ustawienia ich w bezpiecznym położeniu.
W normie przedstawiono jedynie przykładowe rozwiązania, systemy TWS mogą być stosowane we wszelkiego rodzaju obiektach, gdzie wyładowania atmosferyczne stanowią zagrożenie, którego skutkom można zapobiec poprzez wprowadzenie odpowiednich procedur zapobiegawczych.
6. Podsumowanie
Opracowana norma ma charakter jedynie informacyjny. Przedstawiono tam przykładowe rozwiązania stosowane w dostępnych obecnie systemach ostrzegania oraz lokalizacji wyładowań atmosferycznych i może służyć jako pomoc przy projektowaniu nowych systemów. Norma zwraca uwagę na możliwości jakie oferują takie systemy i przedstawia przykładowe zastosowania. Brakuje jednak dokładniejszych informacji, precyzujących np. kryteria wyzwalania stanu alarmowego lub określenie zasięgu stref MA i SA. Systemy wczesnego ostrzegania przed zagrożeniem piorunowym mogą z pewnością stanowić doskonałe uzupełnienie dla tradycyjnych środków ochrony przed skutkami wyładowań atmosferycznych, należy jednak pamiętać, że nie są w stanie ich zastąpić.
Literatura
- PN-EN 62305-3:2011 Ochrona odgromowa – Część 3: Uszkodzenia fizyczne obiektów i zagrożenie życia
- PN-EN 62305-4:2011 Ochrona odgromowa – Część 4: Urządzenia elektryczne i elektroniczne w obiektach
- EN 50536:2011 Protection against lightning: Thunderstorm warning systems
- PN-EN 62305-2:2008 Ochrona odgromowa – Część 2: Zarządzanie ryzykiem
T. Maksimowicz, M. Zielenkiewicz, „Systemy ostrzegania przed wyładowaniami atmosferycznymi w świetle nowej normy EN 50536”. Elektro.info, październik 2011 r.